Scientists built a tiny robot to mimic the mantis shrimp’s knock-out punch

{kind=link}
The mantis shrimp boasts one of the most powerful, ultrafast punches in nature—it’s on par with the force generated by a .22 caliber bullet. This makes the creature an attractive object of study for scientists eager to learn more about the relevant biomechanics. Among other uses, it could lead to small robots capable of equally fast, powerful movements. Now a team of Harvard University researchers have come up with a new biomechanical model for the mantis shrimp’s mighty appendage, and they built a tiny robot to mimic that movement, according to a recent paper published in the Proceedings of the National Academy of Sciences (PNAS).
“We are fascinated by so many remarkable behaviors we see in nature, in particular when these behaviors meet or exceed what can be achieved by human-made devices,” said senior author Robert Wood, a roboticist at Harvard University’s John A. Paulson School of Engineering and Applied Sciences (SEAS). “The speed and force of mantis shrimp strikes, for example, are a consequence of a complex underlying mechanism. By constructing a robotic model of a mantis shrimp striking appendage, we are able to study these mechanisms in unprecedented detail.”
Wood’s research group made headlines several years ago when they constructed RoboBee, a tiny robot capable of partially untethered flight. The ultimate goal of that initiative is to build a swarm of tiny interconnected robots capable of sustained untethered flight—a significant technological challenge, given the insect-sized scale, which changes the various forces at play. In 2019, Wood’s group announced their achievement of the lightest insect-scale robot so far to have achieved sustained, untethered flight—an improved version called the RoboBee X-Wing. (Kenny Breuer, writing in Nature, described it as a “a tour de force of system design and engineering.”)
Now, Wood’s group has turned its attention to the biomechanics of the mantis shrimp’s knock-out punch. As we’ve reported previously, mantis shrimp come in many different varieties; there are some 450 known species. But they can generally be grouped into two types: those that stab their prey with spear-like appendages (“spearers”) and those that smash their prey (“smashers”) with large, rounded, and hammer-like claws (“raptorial appendages”). Those strikes are so fast (as much as 23 meters per second, or 51mph) and powerful, they often produce cavitation bubbles in the water, creating a shock wave that can serve as a follow-up strike, stunning and sometimes killing the prey. Sometimes a strike can even produce sonoluminescence, whereby the cavitation bubbles produce a brief flash of light as they collapse.
According to a 2018 study, the secret to that powerful punch seems to arise not from bulky muscles but from the spring-loaded anatomical structure of the shrimp’s arms, akin to a bow and arrow or a mouse trap. The shrimp’s muscles pull on a saddle-shaped structure in the arm, causing it to bend and store potential energy, which is released with the swinging of the club-like claw. It’s essentially a latch-like mechanism (technically, Latch-mediated spring actuation, or LaMSA), with small structures in the muscle tendons called sclerites serving as the latch.
That much is well understood, and there are several other small organisms capable of producing ultra-fast moves through a similar latching mechanism: frogs’ legs and chameleons’ tongues, for instance, as well as the mandibles of trap jaw ants and exploding plant seeds. But biologists who have been studying these mechanisms for years have noticed something unusual in the mantis shrimp—a one-millisecond delay between when the unlatching and the snapping action occurs.
“When you look at the striking process on an ultra-high-speed camera, there is a time delay between when the sclerites release and the appendage fires,” said co-first author Nak-seung (Patrick) Hyun, a postdoctoral fellow at SEAS. “It is as if a mouse triggered a mouse trap but instead of it snapping right away, there was a noticeable delay before it snapped. There is obviously another mechanism holding the appendage in place, but no one has been able to analytically understand how the other mechanism works.”
Mantis shrimp lack special muscles to produce such fast accelerations, so biologists have suggested that the sclerites are only responsible for the initial unlatching, while the geometry of arm structure serves as a secondary latch that controls the movement of the arm. “The idea is that the linkage design itself is such that you’re able to actually store energy and release it with just one input motion,” co-first author Emma Steinhardt told Ars. “It’s this geometric latch that is releasing all the stored energy.” Steinhardt, Hyun, and their fellow co-authors set out to experimentally test this hypothesis.
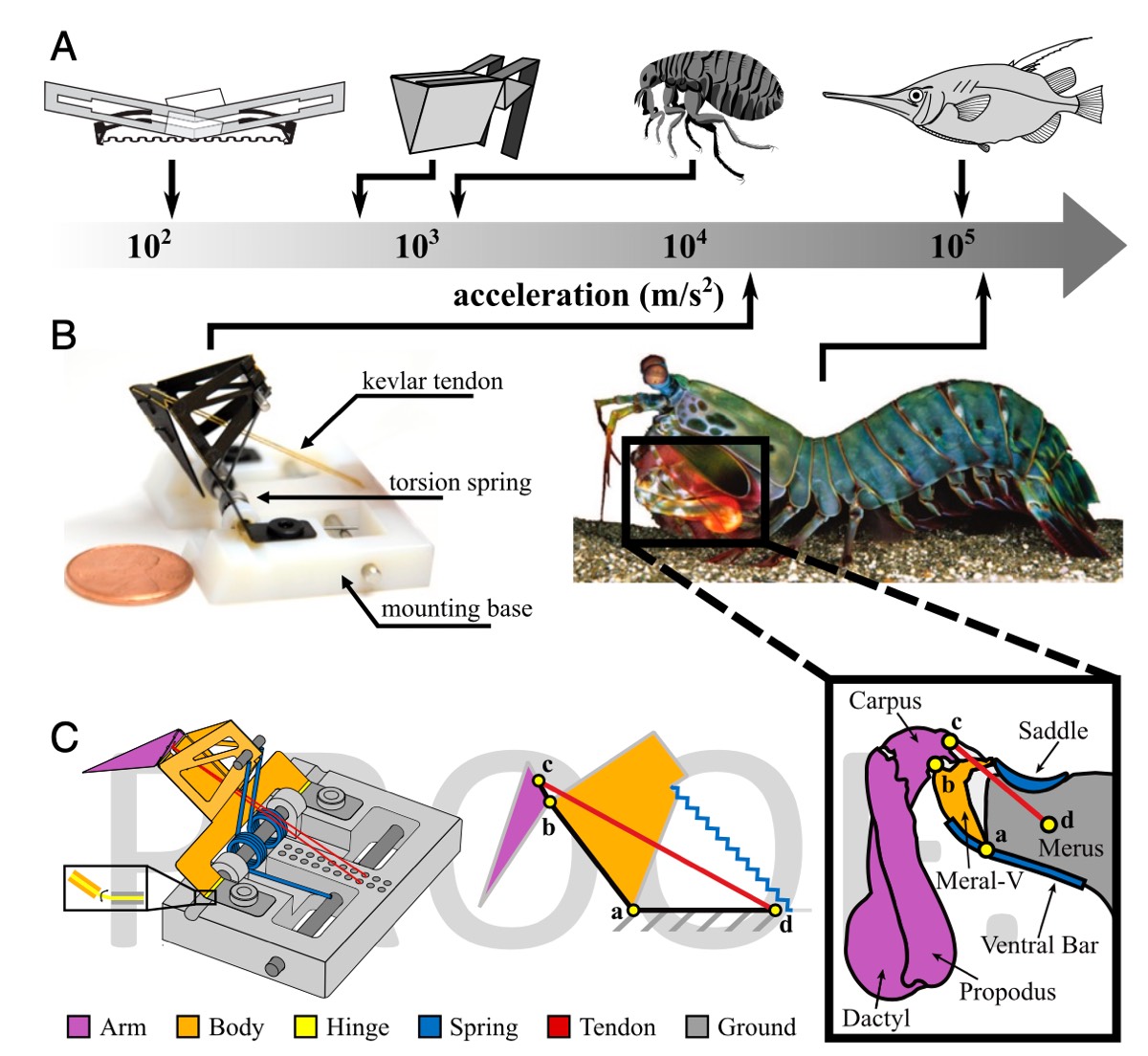
For their robot version of the mantis shrimp appendage, they relied on the unique manufacturing process inspired by pop-up books (pop-up book MEMS) that Wood’s group used to build RoboBee. It involves cutting designs from flat sheets, layering them and bonding the layers with glue, and then folding them into the desired shapes. A miniaturized kind of “artificial muscle” can be made with piezoelectric actuators, while thin plastic hinges make excellent joints for rotational motion. Then they conducted numerous experiments in both air and water with two different loading conditions.
They were able to identify four distinct striking phases and confirmed that, indeed, it’s the geometry of the mechanism that produces the rapid acceleration after the initial unlatching by the sclerites. The little robot mechanism’s performance wasn’t quite mantis shrimp-level, but the appendage still reached 26 meters per second in air, the equivalent of a car going from 0 to 58 mph in just four milliseconds. While that’s not quite as good as the actual animal, it’s still impressive.

The medium might matter: a study last year found that the mantis shrimp punches at half the speed in air, suggesting that the mantis shrimp can precisely control its striking behavior, depending on the surrounding medium. According to Hyun, their experiments showed a so-called “added mass effect” in the water-based experiments. “In fluid mechanics, when you move really quickly, you’re actually pushing a heavier mass,” he told Ars. That effect was low in the RoboBee experiments, since it functions in air, but it’s a critical variable when modeling the mantis shrimp strike in water.
The short delay between unlatching and the snap “is likely a crucial feature enabling repeated and extreme use without the wear and tear of contact latching mechanisms,” the authors wrote. Going forward, they hope to extend their strategy of combining physical and analytical modeling to learn more about other species, such as the underlying mechanisms of trap jaw ants or leaping frogs.
“This study exemplifies how interdisciplinary collaborations can yield discoveries for multiple fields,” said co-author Sheila Patek, a biologist at Duke University. “The process of building a physical model and developing the mathematical model led us to revisit our understanding of mantis shrimp strike mechanics and, more broadly, to discover how organisms and synthetic systems can use geometry to control extreme energy flow during ultra-fast, repeated-use, movements.”
DOI: PNAS, 2021. 10.1073/pnas.2026833118 (About DOIs).
https://arstechnica.com/?p=1788373