

“What we meant by energy efficiency was calculating the energy input and energy output. The energy output was the kinetic energy and the potential energy at the moment of takeoff, defined as the moment when the feet of the robot stop touching the ground,” Shin explains. The energy input was calculated by measuring the power used during takeoff.
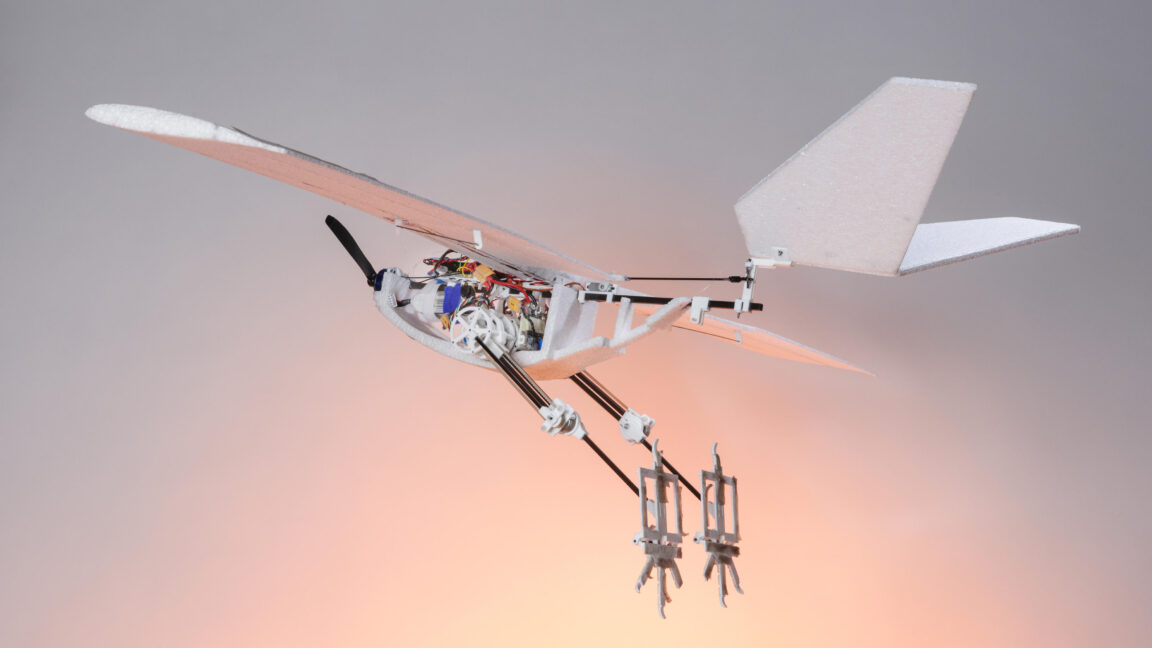
The RAVEN takes flight.
“It turned out that the jumping takeoff was actually the most energy-efficient strategy. I didn’t expect that result. It was quite surprising”, Shin says.
The energy cost of the jumping takeoff was slightly higher than that of the other two strategies, but not by much. It required 7.9 percent more juice than the standing takeoff and 6.9 percent more than the falling takeoff. At the same time, it generated much higher acceleration, so you got way better bang for the buck (at least as far as energy was concerned). Overall, jumping with bird-like legs was 9.7 times more efficient than standing takeoff and 4.9 times more efficient than falling takeoff.
One caveat with the team’s calculations was that a fixed-wing drone with a more conventional design, one using wheels or a launcher, would be much more efficient in traditional takeoff strategies than a legged RAVEN robot. “But when you think about it, birds, too, would fly much better without legs. And yet they need them to move on the ground or hunt their prey. You trade some of the in-flight efficiency for more functions,” Shin claims. And the legs offered plenty of functions.
Obstacles ahead
To demonstrate the versatility of their legged flying robot, Shin’s team put it through a series of tasks that would be impossible to complete with a standard drone. Their benchmark mission scenario involved traversing a path with a low ceiling, jumping over a gap, and hopping onto an obstacle. “Assuming an erect position with the tail touching the ground, the robot could walk and remain stable even without advanced controllers,” Shin claims. Walking solved the problem of moving under low ceilings. Jumping over gaps and onto obstacles was done by using the mechanism used for takeoff: torsion springs and actuators. RAVEN could jump over an 11-centimeter-wide gap and onto an obstacle 26-centimeter-high.
https://arstechnica.com/science/2024/12/robotic-bird-like-legs-let-drones-hop-over-obstacles-launch-to-the-skies/