


{kind=link}
There are plenty of examples of gliding animals: flying squirrels, for instance, as well as certain snakes, lizards, and frogs. Now we can add geckos to that list. Researchers caught Asian flat-tailed geckos gliding in the wild on high-speed video, and found they used their tails to stabilize the landing after colliding head-first into tree trunks, according to a paper published in September in the journal Nature Communications Biology. They verified the biomechanics by building a mini gecko-bot and simulating the gliding behavior in the lab.
As we’ve reported previously, the diminutive gecko is capable of some extraordinary feats of locomotion, zipping along vertical walls with ease and even running short distances across water. Precisely how they accomplish these feats has long interested scientists. For instance, geckos are known for being expert climbers, able to stick to any surface thanks to the tiny hair-like structures on the bottoms of their feet. The little lizards can also zip along the surface of water at high speeds to elude predators. They can’t do it for very long; the energy expenditure required is too great.
A 2018 study found that the mouse-sized lizards use a combination of surface tension and a slapping motion to run across water. Last year, researchers gained insight into the fundamental question of why geckos have so many toes. It seems that geckos’ ability to reorient their flexible toes is a major factor in enabling them to realign and adjust to shifts in gravity (load).
Both of those studies came out of the laboratory of University of California, Berkeley biophysicist Robert Full, who is also a co-author on this latest paper. This time around, Full and his fellow co-authors—Ardian Jusufi and Rob Siddall, both with the Max Planck Institute for Intelligent Systems in Stuttgart, Germany, and Greg Byrnes of Siena College—were intrigued by field reports of flat-tailed geckos gliding and parachuting, although this behavior had never been quantitatively studied. Prior research had placed geckos in a wind tunnel, and found the animals could indeed glide smoothly, often using their tails to help their bodies rotate mid-air.
Based on this, the authors hypothesized that the Asian flat-tailed gecko would not only glide smoothly in their natural habitat, they would also use their tails to turn and maneuver toward their chosen landing site. This species lives in trees and is capable of jumping several meters from one tree trunk to the next, usually to avoid predators. Jusufi suggested conducting experiments with these geckos in a wildlife reserve in Singapore’s rainforests.
First, they collected several geckos (both with and without tails). They set up a platform several meters off the ground, from which the geckos would leap and glide to a nearby tree. High-speed cameras recorded the gliding jumps, revealing that a typical jumping gecko can reach speeds of about 6 meters per second (about 13.4 miles per hour).
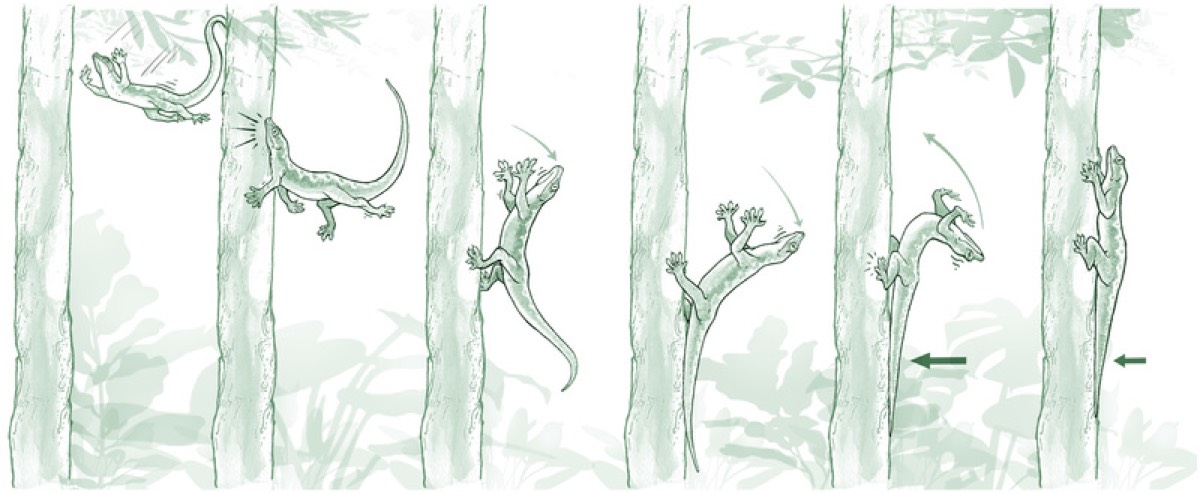
Those geckos with tails were able to consistently land on the target trunk without falling, while those without tails couldn’t maintain their grip after landing. The team expected that the geckos would execute a “controlled collision” landing, much like flying lizards. Instead, the geckos literally crashed headfirst into the tree trunks, using their tails to stabilize the landing.
“Our attempts to film the small, camouflaged lizard in the rainforest revealed a fall arresting response nobody thought these geckos could do and showed us their tails were entirely underestimated,” said Jusufi. “Previously contact tails were thought to be used to maintain grip during rapid wall-running, while the findings presented here suggest that geckos exhibit exaptation of the behavior to improve the success of landing in the wake of their directed aerial descent.”

Specifically, when a gecko crash-lands, it bends its torso backward to cushion the impact, sometimes as far as 100 degrees. This means the front feet lose their grip, with the rear legs hanging on for dear life. When the gecko pitches back, it also pushes its tail into the trunk to help dissipate energy from the collision. Essentially, the tail serves as a fifth leg, helping to stabilize the animal after landing. Geckos who had naturally lost their tails couldn’t dissipate sufficient energy, which is why they fell.
“This field discovery on the perching behavior of geckos has important implications for our understanding of tails as multi-functional appendages that animals can rely on,” said Jusufi. “Ranging from inertial to contact tails, they facilitate the most extreme transitions, such as from gliding flight to collision with a wall. One of the most dramatic transitions we can think of in multi-modal locomotion is to alight on a vertical surface from high-speed gliding flight to a standstill.”
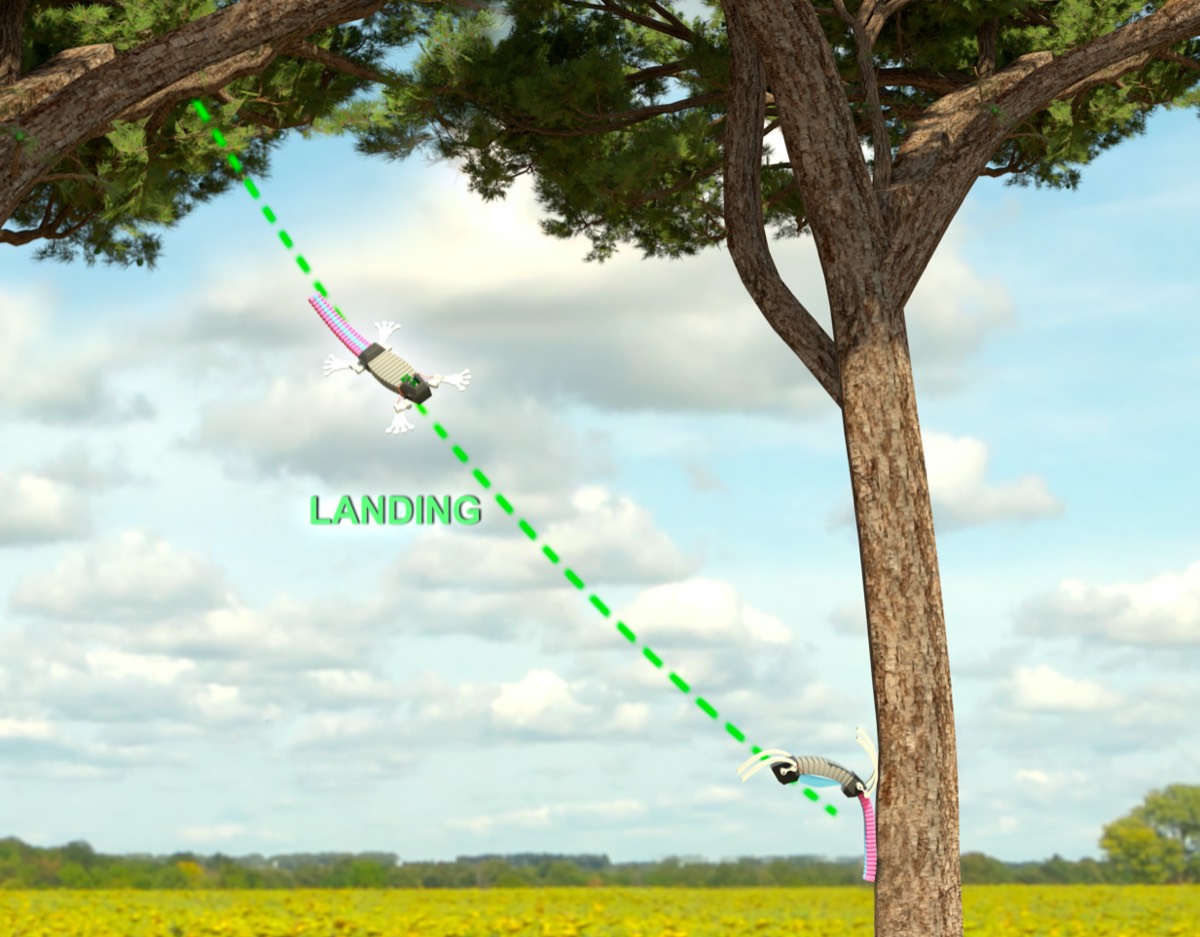
To verify their field observations, the team built a gecko-inspired robot, with a soft torso, four compliant feet with Velcro pads on the bottoms, and detachable tail. The robot was programmed to bend its tail when its front foot hit a surface. A micro-controller located on the robot’s shoulder activates a motor, causing a tendon to push the tail into the wall to stabilize the landing.
The researchers used a catapult to launch the robot toward a landing surface: a wooden plate covered with a felt fabric sheet, to simulate a tree trunk. Just below was a second plate connected to a force sensor, positioned so that just the robot’s rear feet would make contact upon landing. Jusufi et al. videotaped their launches and used the footage to extract the robot’s pose information during landing.
The results: the longer the gecko’s tail, the lower the force pulling the back feet away from the surface, and the easier it was for the robot to hang on after crash landing. When they removed the gecko-bot’s tail, however, the forces on the back feet were too high, causing the robot to lose its grip, bounce off, and fall—just like its living tail-less counterparts. So the tail is indeed essential to stabilize the gecko’s high-speed crash landing. This work could one day help improve robotic locomotion, according to Jusufi, making bio-inspired robots more robust and simpler to control.
DOI: Nature Communications Biology, 2021. 10.1038/s42003-021-02378-6 (About DOIs).
https://arstechnica.com/?p=1822841