

{kind=link}
Robots have traditionally been roughly humanoid in form, which has some obvious advantages, in that the robots are better able to integrate into a human-designed environment. But there are lots of environments that aren’t human designed, and researchers have been experimenting with robotic forms that look more like insects or fish. Now, a team of Swiss researchers has produced a robot that looks like nothing more than a walking circuit board. Despite its small size, though, the robot is able to move by hopping, leaping, or walking, and it can even work in a group to coordinate activities.
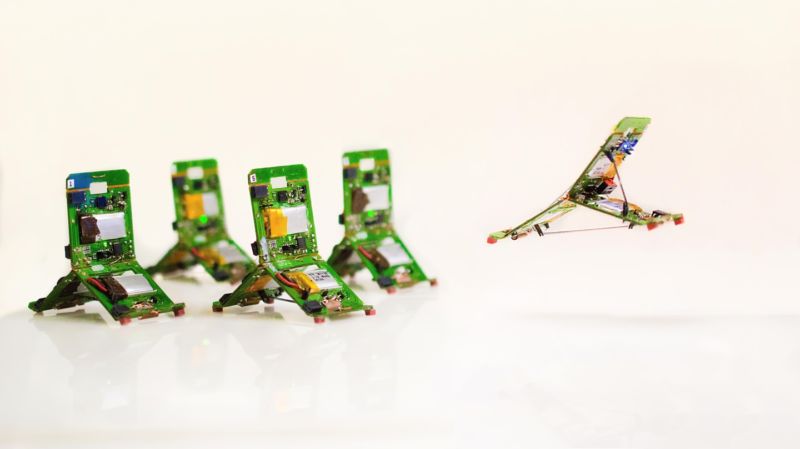
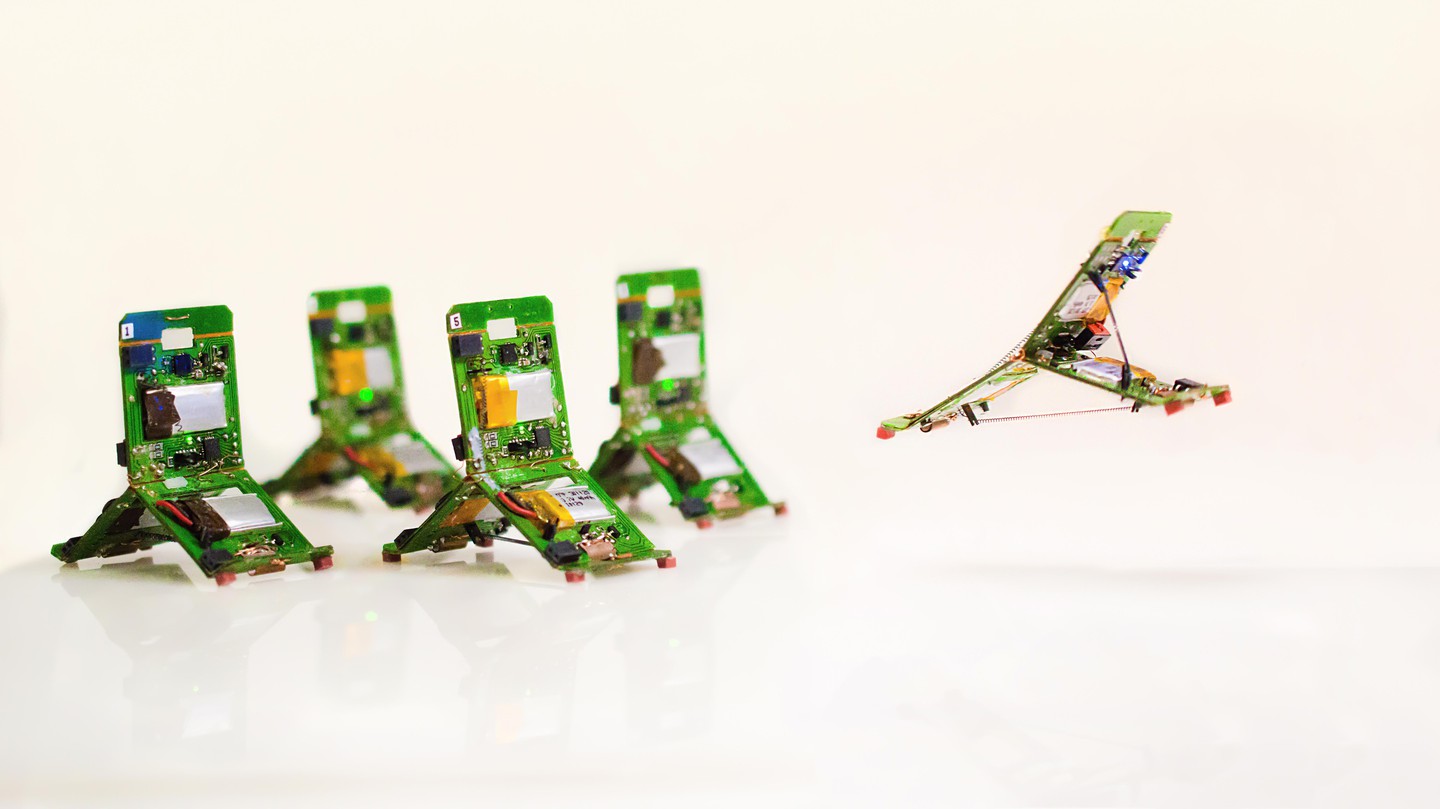
Meet Tribot
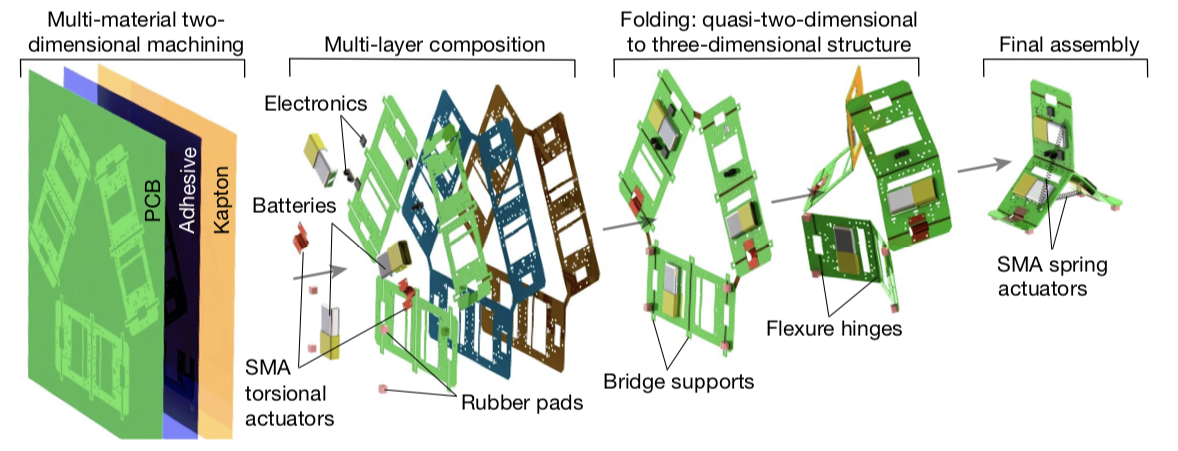
The team calls its creation Tribot, for reasons that are obvious from its photo above. Tribot looks like a tiny circuit board because that’s what it largely is, but there are some significant additions to the circuitry. One is a small lithium polymer battery, which means all the power for its motions and circuits are carried on board. The motions are powered by what’s called a shape-memory alloy, which can be deformed at one temperature but snap back into place once the temperature is changed. Flexible hinges and a polymer core allow these “muscles” to move any of the three legs either gradually or with a sudden snap, all enabled by tiny heaters embedded in the hardware.
Another interesting feature of the robot is its construction. The circuit board and polymer are originally made as a flat, triangular unit. A couple of folds are all that’s needed to convert this shape into the Tribot’s trefoil design.
Tribot can walk as you might expect by shuffling its front and rear legs forward one at a time. But it’s the third arm of the robot that allows it to engage in some rather unusual forms of motion. By snapping forward, Tribot can do a forward somersault; add in some motions with the legs to control things, and this can be turned into a forward leap that allows the robot to clear gaps up to four times its body size. Keep the top arm steady and snap the legs, and Tribot can leap up to 2.5 times its own height.
The authors say they were inspired by trapjaw ants, which can hurl their bodies around by making sudden movements with their mandibles. Based on the energy involved in these motions, the researchers say that Tribot is about as energy-efficient as an insect.
The robot represents a significant advance, given that previous attempts at building robots that could move via different mechanisms involved simply having the robot carry different hardware for each mode of movement. But perhaps just as surprising is that the tiny circuitry contains everything needed for the robots to cooperate to perform tasks.
In one instance, the researchers set up one Tribot as a leader and set a second to follow it. The leader was able to detect a gap and signal its location to the follower. The follower, which wasn’t paying attention to the terrain, simply got to the spot that its leader indicated and leapt over the gap once it got there.
In a second test of cooperation, two Tribots pushed a block that was heavier than either could move alone. The location they pushed it to was indicated by a third Tribot, which monitored progress. It sent updates on the progress to a leader, which coordinated the two workers. Finally, a fifth Tribot was needed as a communications relay once the block cut off the line of sight between the leader and the progress monitor.
If you’re asking how many Tribots are needed to screw in a light bulb, the answer is “more than you might think.”
As is often the case in robotics, the authors stress the possibility of “applicability to real-world problems, such as emergency mitigation, environmental monitoring, and exploration.” But they also suggest that the work is an interesting platform to explore things like new modes of locomotion and the possibility of custom-manufactured robots for specific tasks. There also seems to be room here to turn this into something similar to the Raspberry Pi of robotics: cheap and accessible enough that nearly anyone could pick one up to experiment with.
Nature, 2019. DOI: 10.1038/s41586-019-1388-8 (About DOIs).
https://arstechnica.com/?p=1534151